
| |
 |
 |
 |
 |

| |
|
| |
安定性ってなぁに?
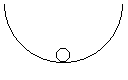
お椀の底にビー玉が一つ入っている状況を考えましょう。 ビー玉をちょっとつついてみると、ビー玉は左右に転がりますが、 次第に速度をゆるめ、最終的には、お椀の底の部分で止まります。 このように、もとの状態に戻ろうとする性質のことを安定性といいます。 お椀の底にビー玉が止まっている状態は安定であると言えます。
|
|
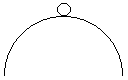
反対に、お椀を伏せてそのてっぺんにビー玉を載せた状況を考えましょう。 運良くビー玉がお椀の上に止まったとしても、ちょっとつついただけで、 すぐにビー玉はお椀から転げ落ちてしまいます。このような状態は不安定 といいます。
振り子が立った状態は、そのままでは、ちょっとつついただけで倒れてしまいますので、 不安定です。振り子を立たせるためには、システムを安定化しなければなりません。 そのために、ちょっと振り子の先端をつついても、もとの状態に戻るように、 台車の位置を制御します。
フィードバック制御ってなぁに?
目をつぶっては、傘を手のひらの上で立たせることは不可能でしょう。 傘を手のひらの上で立たせるときは、傘がどちらに倒れそうかを目で見て 判断し、手のひらを動かします。 このように、対象の状態を検出して(目で見て) その情報(どちらに倒れそうか?)をもとに、 制御入力(手のひらをどちらに動かすか?)を決定する制御をフィードバック制御 といいます。 不安定なものを安定化するときは、必ず、フィードバックが必要です。
倒立振子ロボットでは、目で見る代りに、 光センサーでどちらに倒れそうかを検出します。